Je suis actuellement en Terminale STI2D Option SIN et je viens me renseigner auprès de vous pour des choix de capteurs. La conception de notre projet de fin d’année approche, il nous faut choisir précisément les composants qui le composent.
Notre projet est un système de tri qu’on place au-dessus de trois poubelles (1 plastique, 1 papier et 1 aluminium/acier). Lorsqu’on passe l’objet devant les capteurs, une « goulotte » est censé diriger cet objet dans la poubelle concernée.
Seulement voilà, nous ne savons pas comment différencier les différents objets…
Pour détecter une canette, nous avons pensé à un capteur inductif. Pour détecter une bouteille transparente (et sans couleur) et du papier comment pouvons-nous procéder ? Nous avons pensé à capteur optique pour « détecter » l’opacité mais nous ne savons pas vers quel capteur nous diriger.
Nous utiliserons une raspberry pi.
PS: Nous sommes 4, il faudrait si possible 3 capteurs pour effectuer 3 détections (personnellement je m’occupe de la pesée, avec une jauge de contrainte).
Dans le tutoriel, j’utilise un fichier pré-entraîné « MobileNetSSD_deploy.caffemodel » et fichier de configution « MobileNetSSD_deploy.prototxt.txt ». On peut les télécharger sur GitHub. 21 objets différents ont été entraînés.
En fait c’est presque du tout cuit.
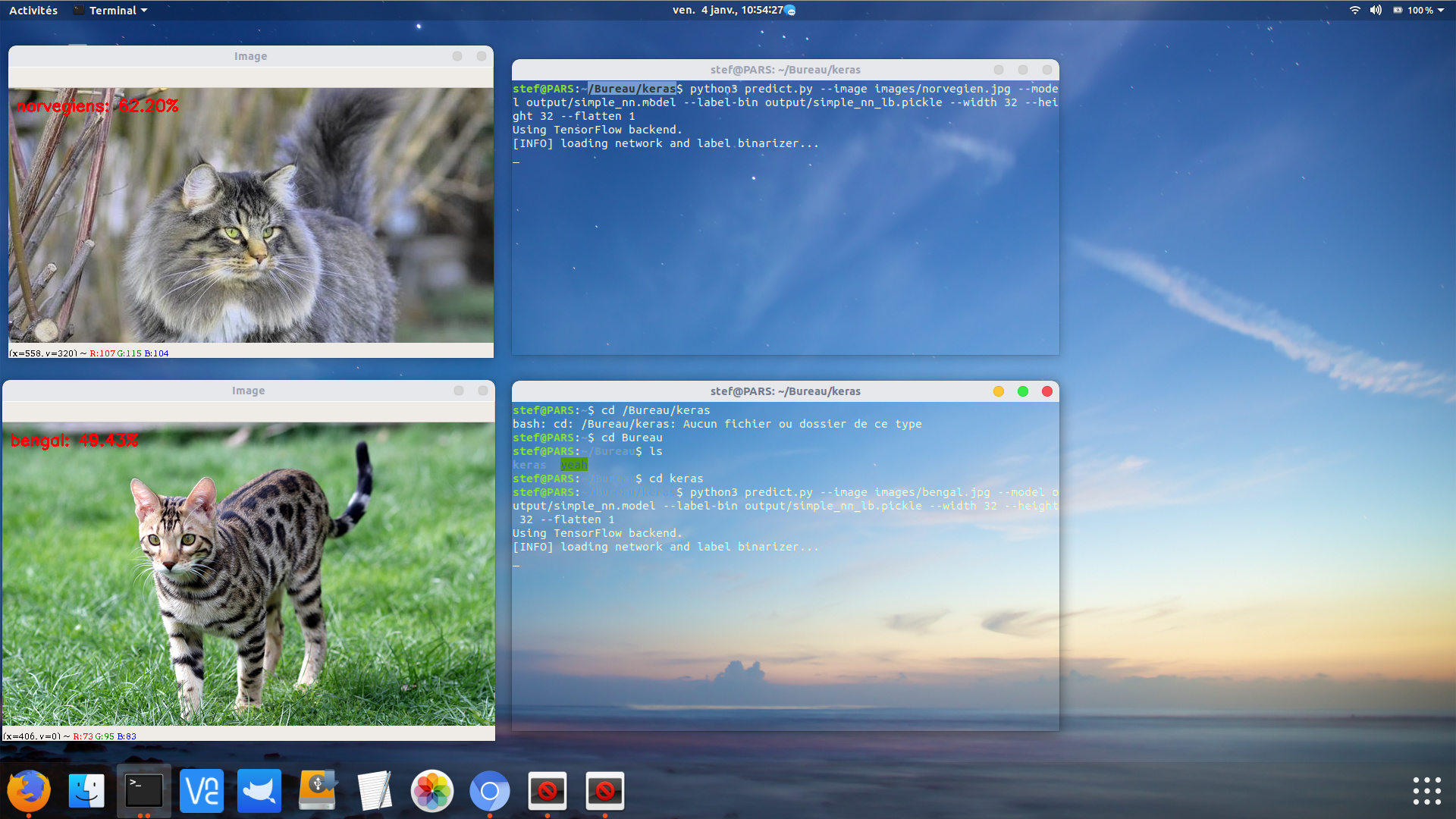
Actuellement, je suis entrain de rédiger un article sur « comment réaliser votre propre modèle de détection d’objets ».
Pour mon cas, j’ai téléchargé plus de 1000 images de trois races de chats différents: le Norvégien, le Bengal, le Chartreux. Le programme Python se chargera d’entraîner notre futur modèle.
Une fois le fichier généré, un autre programme s’occupera de la prédiction et la reconnaissance d’une image d’un chat correspondant à l’une des 3 races.
Donc on pourrait appliquer le principe pour le projet de l’équipe de Maxou.
Par contre, il sera nécessaire d’entraîner le modèle de prédiction (plastique / papier / alu) à partir d’un P.C.
Je ne pense pas que la Raspberry soit suffisamment puissante.
Mais une fois que notre fichier est généré, la Framboise (3B+) équipé d’une Picaméra, pourra effectuer le travail de reconnaissance des déchets.
Entre la nature du matériau (capteur effet Hall ??), la taille (en utilisant 2 lasers qui recalent aussi la vitesse), le poids (jauge de déformation), on peut déjà imaginer pas mal de solutions non?
Outch, nouvelle vision des choses.
Et pas des moindres.
Une de mes filles avait un projet ISN (Informatique et Sciences du Numérique) en Terminale S avec 2 copines.
J’ai un peu aidé et, franchement, ce type de projet me parait (certes hyper-intéressant) un peu complexe.
Cependant, je ne connais pas la Term STI2D (je suis de la génération « Bac D »).
Maintenant, si @maxou54200 s’embarque là-dedans, ça serait cool de basculer le rapport en tuto sur le Net une fois les résultats du bac passés
(Cela n’engage que moi ; je pourrai aider au travail de relecture/correction, mais attention à bien bosser par vous même car je pense que les profs savent utiliser les moteurs de recherches pour vérifier que le boulot est relativement personnel tout de même).
@paul18fr Avec le poids, attention:
entre le poids, la densité des matériaux et la densité apparente des différents objets, ça risque d’être difficile
Il me semble avoir lu quelque-part que les centres de tri utilisent une technique, fait un premier tri avec des convoyeurs inclinés et en fonction du lieu de chute (plus ou moins loin de l’aplomb du convoyeur, il peuvent déjà trier certains truc). Désolé, ça vous aide pas beaucoup…
plutôt que le détecteur inductif, je verrait plutôt l’électro-aimant: ça vient= c’est ferromagnétique, ça viens pas= c’est amagnétique
Le poids c’est pour différencier le plomb de la plume
Je ne connais pas précisément le sujet et donc je lance des idées ‹ ‹ comme ça › › mais je vois bien un tube pvc dans lequel passe l’objet à trier ; ensuite un vérin + une trappe en fonction de la nature du matériau et les goulottes qui vont bien
Pour le métal je me rappelle avoir vu dans ‹ ‹ c’est pas sorcier › › il y a quelques années qu’on peut rendre l’aluminium magnétique pendant quelques secondes en faisant passer un courant électrique
Tout ça pour dire qu’il y a sûrement plusieurs approches possibles -> une bonne séance de ‹ ‹ remu-meninges › › à faire
Attention à ne pas confondre le ferromagnétisme, avec les courant de Foucault et leur effets crées par le passage d’un champ magnétique dans un matériau conducteur. Le rotor d’un moteur asynchrone n’est pas ferromagnétique et pourtant, il tourne entraîné par un champ magnétique tournant. Peut être qu’un matériaux conducteur peut être distingué d’un matériau isolant en utilisant un certain type de capteur inductif, mais dans ce cas, ça dépasse mes connaissances actuelle en la matière.
Il peut effectivement rester un champ magnétique rémanent dans certains matériaux non ferromagnétique, mais je vois difficilement comment cela pourrait te servir.
Bonsoir,
vous pouvez simplifiez votre projet, avec une camera, une Rasperry Pi 3B+ et un système de reconnaissance d’objets comme évoqué plus haut.
Ce système vous dispensera de tout moyen compliqué à base de capteurs.
La caméra et les programmes associés, (Python, OpenCV) peuvent réaliser votre projet de trie sélectif, avec l’œil de la pi-caméra.
Le coût du projet est mineur par rapport à une solution à base de capteurs électroniques, du plus vous aurez des résultats performants et durables.
Si vous voulez que l’on creuse votre projet, pas de soucis, l’idée est de le faire partager à tout les lecteurs du forum.
Merci de vos reponses. Effectivement, il serait intéressant de partage notre travail et c’est ce que nous ferons. On va tous mettre en ligne et expliquer notre conduite de projet après le bac.
J’ai maintenant à la maison un capteur inductif et il convient parfaitement je trouve car on va pouvoir faire des conditions, avec le capacitif, l’emetteur et récepteur infrarouge…
Du coup comme je l’ai dis précèdemment, on va voir pour utiliser un capteur capacitif pour nous indiquer s’il y a un objet ou non, ensuite on va analyser les données du capteur IR et inductif et le tour est joué.
Après pour le mécanisme de tri, on a pensé comme dit précédemment de faire un système où l’objet tombe dans un dispositif où il y a tous les capteurs qui vont ouvrir la trappe, la goulotte dirigera l’objet dans la poubelle concernée
Désolé mais pour ce cas, votre système à base de capteurs, n’est pas une solution à long terme.
Vous allez multiplier des modules mécaniques et électronique qui seront au bout de quelques années, obsolètes, cher à l’achat, et pas forcement entretenu par les prochain élèves.
Alors qu’une simple Raspberry avec sa caméra et le bon programme peuvent faire le boulot pour un moindre cout.
De plus, vous bénéficier d’une grande communauté qui pourrait vous aider pour le projet.
@stef-k
En fait, si c’est comme pour ma fille, c’est un projet Bac qui ne sert à personne ni à rien « in fine ».
Bon, dans le cas de ma fille et ses 2 copines, ça m’a servi à moi puisque ce fut, finalement, mon boulot.
Mais je pense que le travail de maxou54200 restera un proto perso et ne deviendra pas un produit d’usage pérenne.
Ben, on peut régler ça a posteriori aussi (oui, c’est mal)
Dans le cas cité plus haut, j’ai pondu le sujet, fait 99% des recherches, 100% de la mise en application réelle (c’était mon Rpi et tout mon matos qui était chez moi).
J’ai même réalisé un document écrit qui pouvait être utilisé par simple [copier/coller].
MAIS, j’ai fait des cours avec démonstrations et explications à 1 groupe de 2 puis autre groupe de 2 puis en groupe de 3 (elles étaient 3).
J’ai expliqué chaque ligne des scripts et le pourquoi de chaque chose (j’ai appris plein de trucs au passage)
J’ai donné comme règle qu’elles fassent leurs recherches pour comprendre et expliquer.
Elles se sont donc partagé des recherches mais ont aussi intégré leurs dérives et erreurs de début (lors de la recherche de sujet et des premières idées que j’avais lancé).
J’ai refait toute l’installation avec elles, en repartant de zéro, en les laissant me guider pour m’assurer qu’elles maitrisaient le sujet.
(Bonnes notes pour les 3, même si l’une « plus légère » en terme d’investissement a forcément eu moins)
Et comme le dit @stef-k ; y a du boulot de recherches, d’essais, de rédaction, … pour occuper 4 personnes
Tu as raison de préciser (quand c’est possible), car les déchets doivent passer relativement vite sur le tapis de trie.
Hors les logos ou symboles, sont moins facile à détecter car ils sont fixés sur un point précis de l’emballage.
Pour ce cas de figure, il faut entraîner un modèle de canette aluminium (sodas), des bouteilles plastiques genre (eaux plates, gazeuses, jus de fruits) et du papier.
Avec Python, on peut commander une action de sortie, en fonction du résultat de la détection. Par exemple, trois trappes qui distribuent les déchets dans les poubelles respectives.

 tout de même).
tout de même).


