Bonsoir,
Pourquoi dit-tu que le codeur te semble fragile? l’ensemble moteur + réducteur sont dans un coffre, et il y a un peut de place justement pour placer ce codeur sur la chaîne :

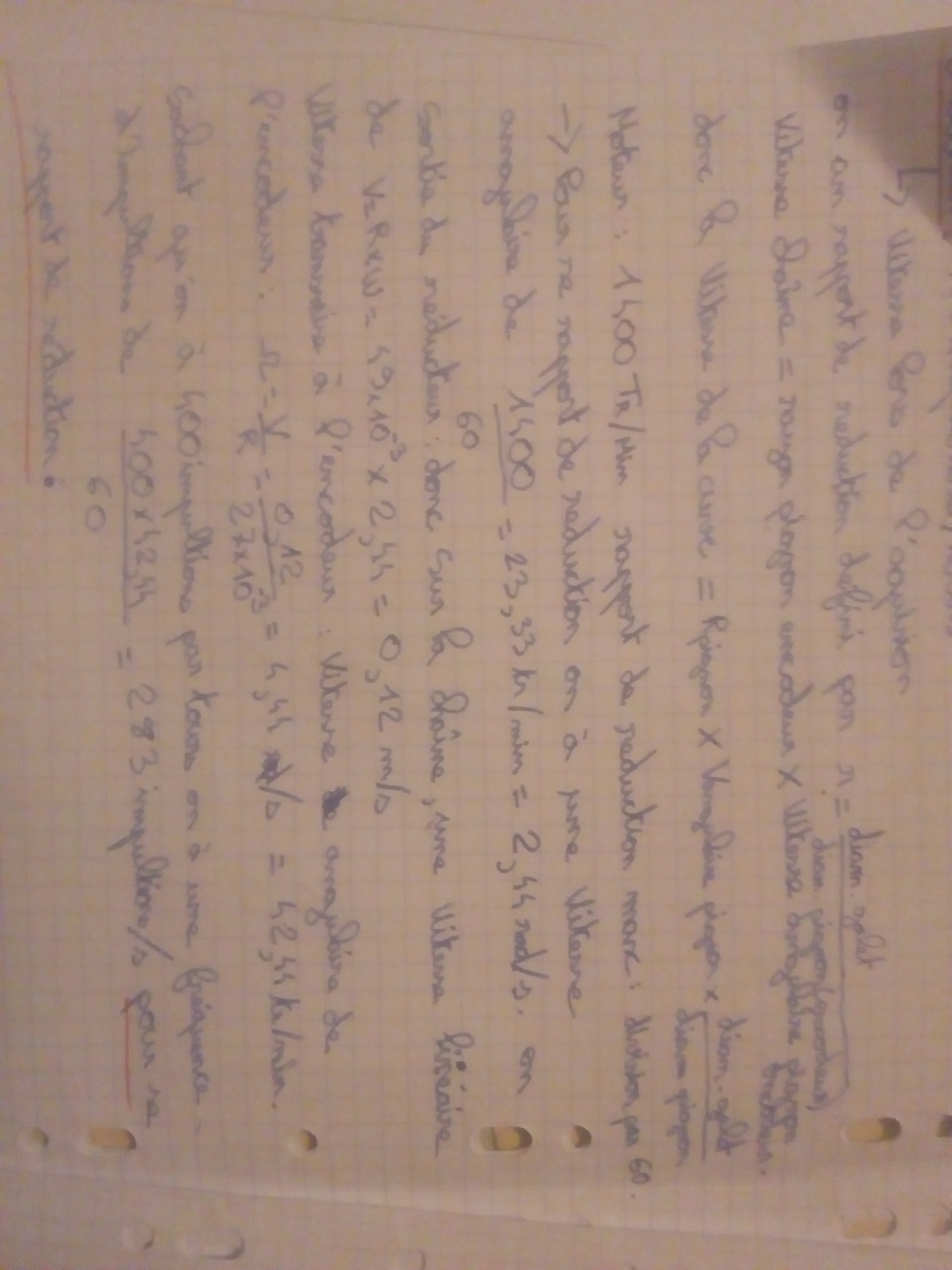
J’ai aussi fait un petit raisonnement pour quand le rapport de réduction est maximal :
le problème, c’est que le rapport de réduction ne sera pas forcément a sa valeur max puisqu’il est variable alors comment trouver la fréquence du codeur a chaque instant?
Si il est possible de brancher directement le codeur sur RPI je serais d’accord pour utiliser le python avec les aides sur le net. Le truc c’est que Chez Gotronic, il m’avait dit que c’était pas possible, reste à savoir pourquoi?
@lejopo: je faisait référence à ce que tu à posté au sujet de l’aquarium. Sur ton schéma, tu y montrais comment câbler une sortie « collecteur ouvert » (si je me trompe pas sur le nom), le plus simplement du monde, puisque les résistances « pull up » sont déjà intégrées au Rpi.
et donc ça annule les interrogations que j’avais.
@pierre14: Le codeur ou le capteur doit être placé en sortie, tu l’as bien compris? Dans ce cas, il donnera une image de la vitesse de sortie, peu importe le rapport du réducteur.
Il ne savent pas forcément tout chez Gotronic.
Oui sa j’ai compris, ce que j’ai pas compris c’est comment avoir cette image de la vitesse. C’est pour cela que je faisais avec le réducteur mais se n’est pas possible puisque que le rapport de réduction est une variable. Je crois que j’ai toujours un problème avec les codeurs.
Je viens de consulter le document sur le capteur, c’est bien ça même principe que sur ce post Projet rasberry contrôle aquarium - #10 par alexxxb62 - Projets - Le Forum français de la Raspberry Pi - Raspberry Pi FR (Raspbian France).
A+
Merci pour vos réponses, il y a juste a faire un pont diviseur se qui est pas plus mal, pas besoin d’un autre module. Par contre j’ai toujours pas compris comment on obtient cette image de la vitesse avec le codeur.
Non! @jelopo viens de confirmer dans son précédent post comment se câblait ce codeur et ce n’est pas avec un pont diviseur. Relis, regarde la doc et dis nous ce que tu as compris.
C’est dommage parce que c’est la base.
La fréquence délivrée par le codeur est l’image de sa vitesse angulaire, qui est proportionnelle à… tout ce qu’on a dit en début de sujet.
Les résistances de pull UP sont déjà intégré ? Donc il y aura pas besoin de ceux qui sont fournis avec le codeur. Et on le branche directement sur le GPIO. Je vais revoir le principe du codeur. A croire que j’ai un vrai problème de compréhension.
Bonjour,
Oui, mais, il faut les configurer logiciellement pour les activer quand même !
A+
Et comment tu les active?
Bonjour,
Cela dépendra du langage et de la bibliothèque utilisée pour accéder aux port GPIO.
En général, c’est bien documenté sur le net.
A+
Bonsoir,
Ok merci de vos réponses, je vais me documenter et je revient après
une autre question au passage. Pensez-vous qu’il existe des petit écrans en hdmi (ou je pourrait afficher la vitesse)?
En fait j’ai posté trop vite, j’ai trouver un truc sympas en LCD sa devrais aller
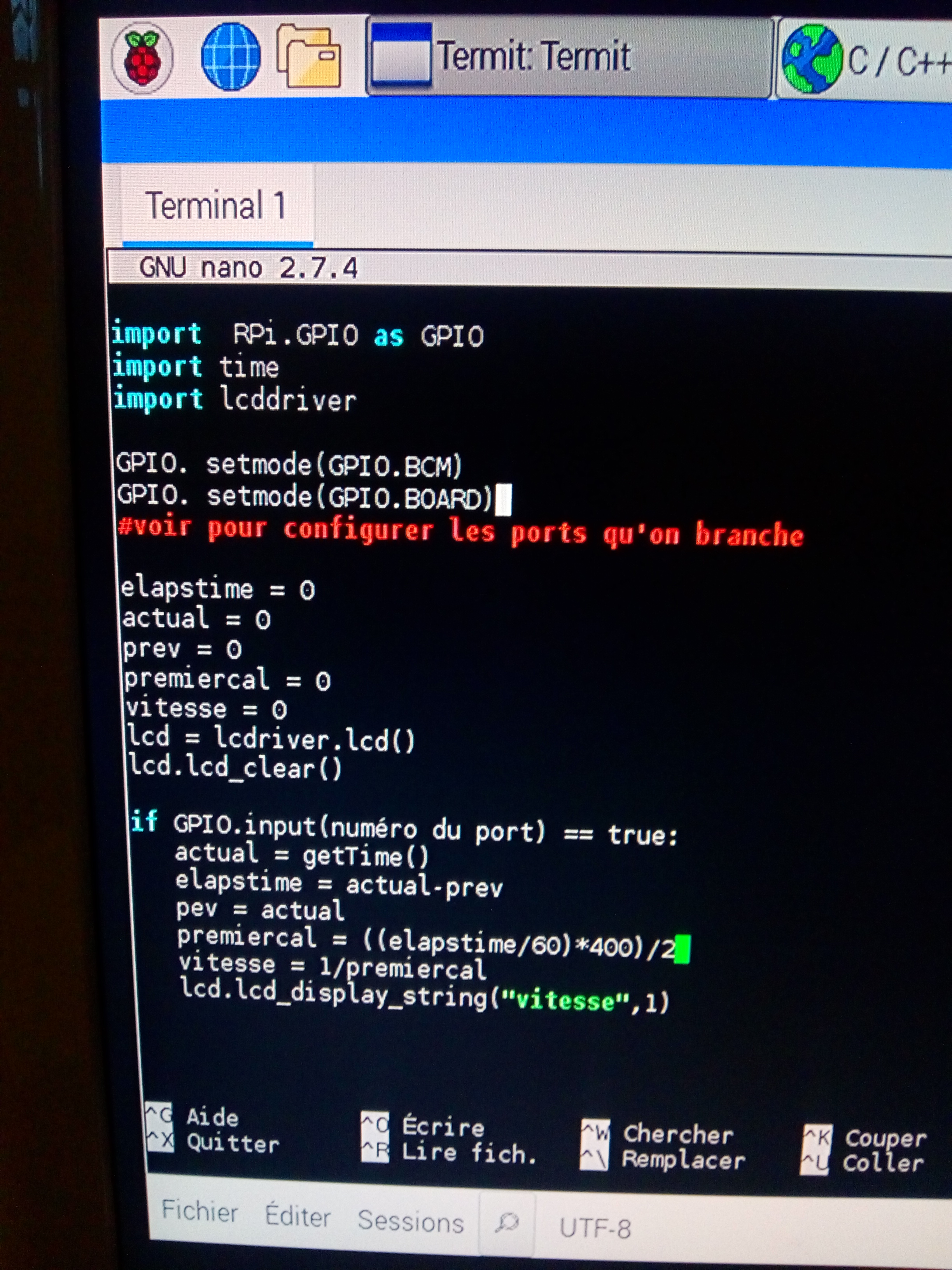
Bon me revoilà j’ai vue 2 3 trucs. Encore une question de plus. Comment on mesure le temps actuel sur le raspberry
Bonjour,
Pour aller plus loin que 2 3 trucs consulter ce topic
Bonne lecture.
A+
Merci @jelopo, j’étais passé à coté.
@pierre14: la réponse à ta question se trouve dans le tutoriel du télémètre à ultrason.
Je conseille en premier le livre de Apprenez à programmer en Python (de Vincent LE GOFF).
Pour débuter, simple, didactique, efficace.
Pour info, on trouve le même contenu dans ce lien.
https://openclassrooms.com/fr/courses/235344-apprenez-a-programmer-en-python
Bonne lectures.
A+

« Les grands esprits se rencontrent » Je suis en pleine lecture.
Merci pour tes conseils et pour tes infos.