Bonjour à tous,
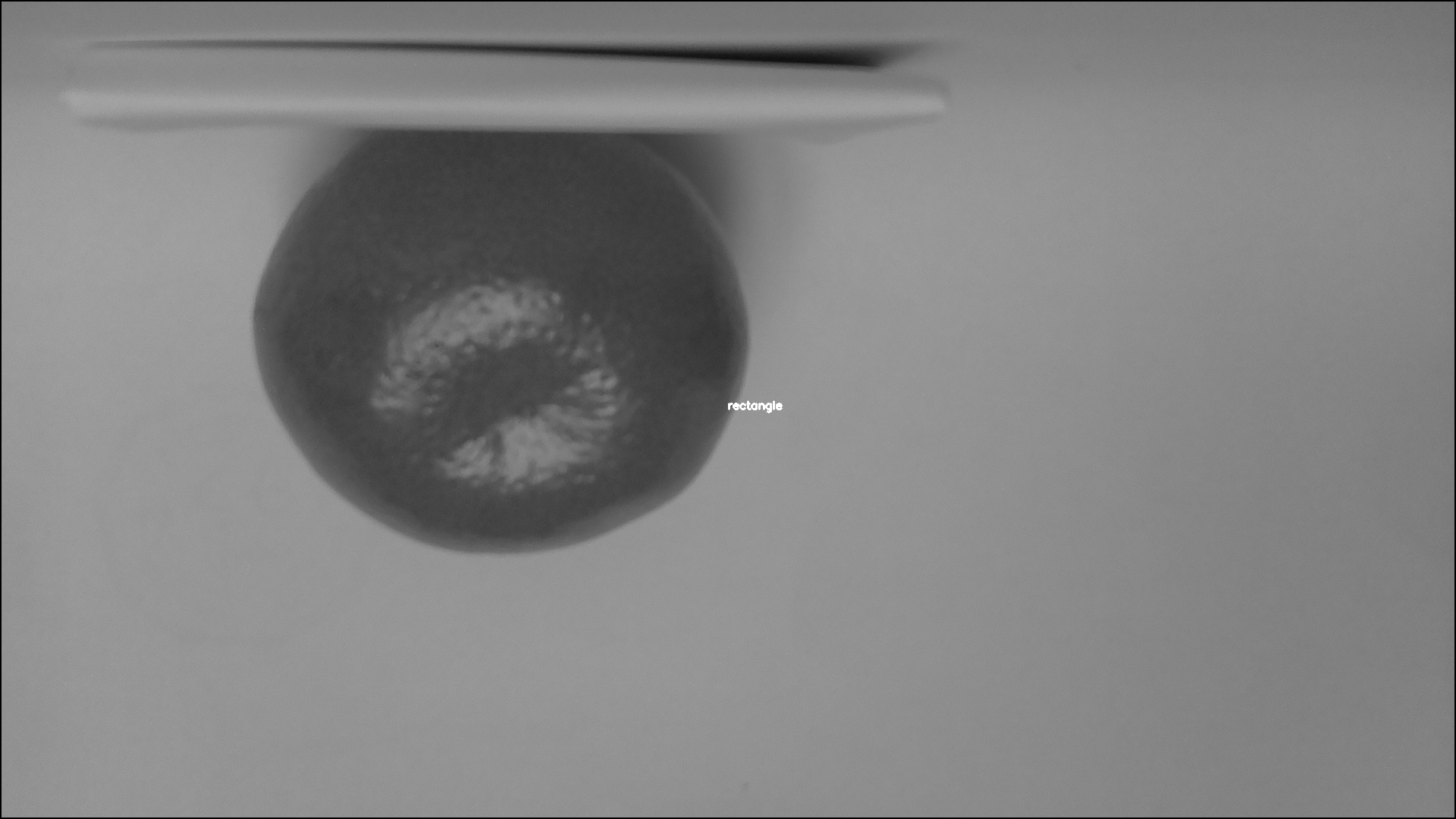
j’ai pour projet de reconnaître des formes au moyen de la caméra Raspberry Pi. Je me suis aidé d’un programme trouvé sur le net qui fonctionne parfaitement avec des images diverses. Cependant, l’histoire se complique avec une prise de photos de la caméra. Le programme croit tout le temps reconnaître un rectangle. Voici le code du programme de reconnaissance avec la caméra :
import picamera
import time
import os
import numpy as np
import cv2
# Supression de l'image précédente dans le fichier
file = os.listdir('/home/pi/Camera/PhotoReconnaissance')
os.remove('/home/pi/Camera/PhotoReconnaissance'+'/'+file[0])
camera = picamera.PiCamera()
camera.resolution = (720,1080)
camera.start_preview(fullscreen = False, window=(50,50,640,480))
time.sleep(5)
# Photo prise
camera.capture('/home/pi/Camera/PhotoReconnaissance/image.bmp')
camera.stop_preview()
image = cv2.imread('/home/pi/Camera/PhotoReconnaissance/image.bmp',0)
gray = image
ret,thresh = cv2.threshold(gray,250,255,cv2.THRESH_BINARY_INV)
img,contours,h =cv2.findContours(thresh,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
for cnt in contours:
perimetre=cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt,0.01*perimetre,True)
M = cv2.moments(cnt)
cX = int(M["m10"] / M["m00"])
cY = int(M["m01"] / M["m00"])
cv2.drawContours(image,[cnt],-1,(0,255,0),2)
if len(approx)==3:
shape = "triangle"
elif len(approx)==4:
(x, y, w, h) = cv2.boundingRect(approx)
ratio = w / float(h)
if ratio >= 0.95 and ratio <= 1.05:
shape = "carre"
else:
shape = "rectangle"
elif len(approx)==5:
shape = "pentagone"
elif len(approx)==6:
shape = "hexagone"
else:
shape= "circle"
cv2.putText(image, shape, (cX, cY), cv2.FONT_HERSHEY_SIMPLEX,0.5, (255, 255, 255), 2)
image_data = np.asarray(image)
cv2.imshow('image',image)
cv2.waitKey(0)
cv2.destroyAllWindows()Voilà où j’en suis pour le moment. Donc si vous avez des solutions ou des alternatives je suis preneur !
Merci de votre aide !