Bonjour,
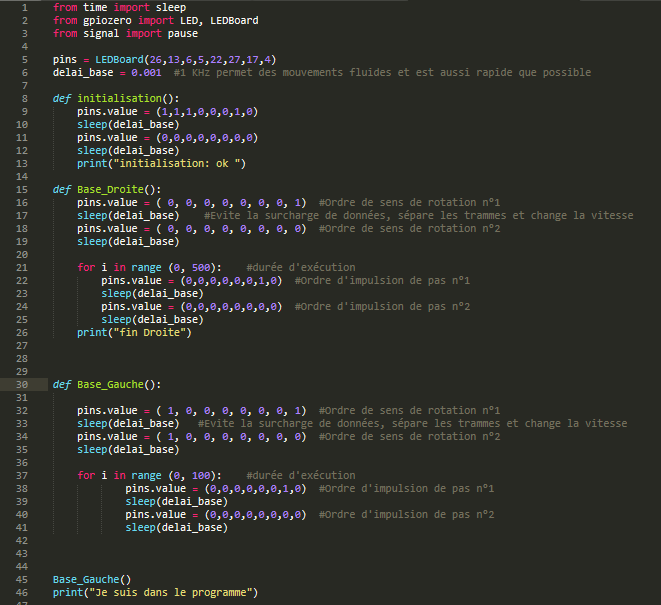
Je travaille actuellement sur la rénovation d’un robot Youpi, c’est un petit bras robotisé avec quelque moteurs pas à pas. J’aimerais le faire fonctionner à l’aide d’une manette de jeu Xbox, après quelque recherches j’ai configuré la carte afin qu’elle alimente les moteurs correctement, je peux déplacer le robot à ma guise à l’aide de la fonction « Base_Gauche() » par exemple. Cependant le robot ce déplace parfaitement lorsque j’utilise la fonction seule, mais dès lors que j’ajoute la connexion avec la manette la fonction se lance du début à la fin mais les moteurs ne fonctionnent pas (parfois ils ne fonctionnent que partiellement).
J’espère avoir été assez clair, merci de votre attention
Maxime